Project 2: Filter (Algo Answers)
You can find the handout for this project here. Please skim the handout before your Algo Section!
You may look through the questions below before your section, but we will work through each question together, so make sure to attend section and participate to get full credit!
Convolution
Discrete Convolution
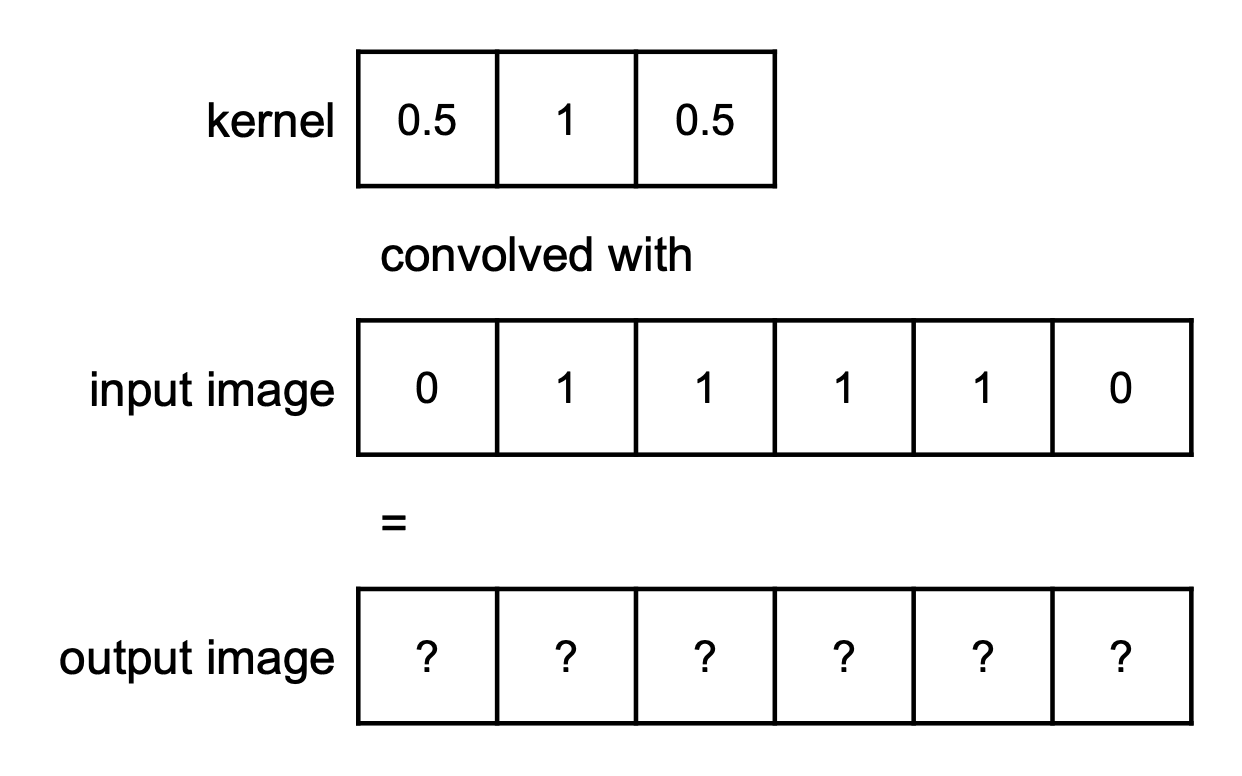
You are given the following 1D kernel and input image. Assume that any pixel outside the bounds of the input image has value 0 (i.e. the image is zero-padded).
What is the output image when the kernel and image are convolved with each other? Present your answer as a vector of size 6, representing the output image.
As a group, discuss what visual effect this kernel might have on a real image.
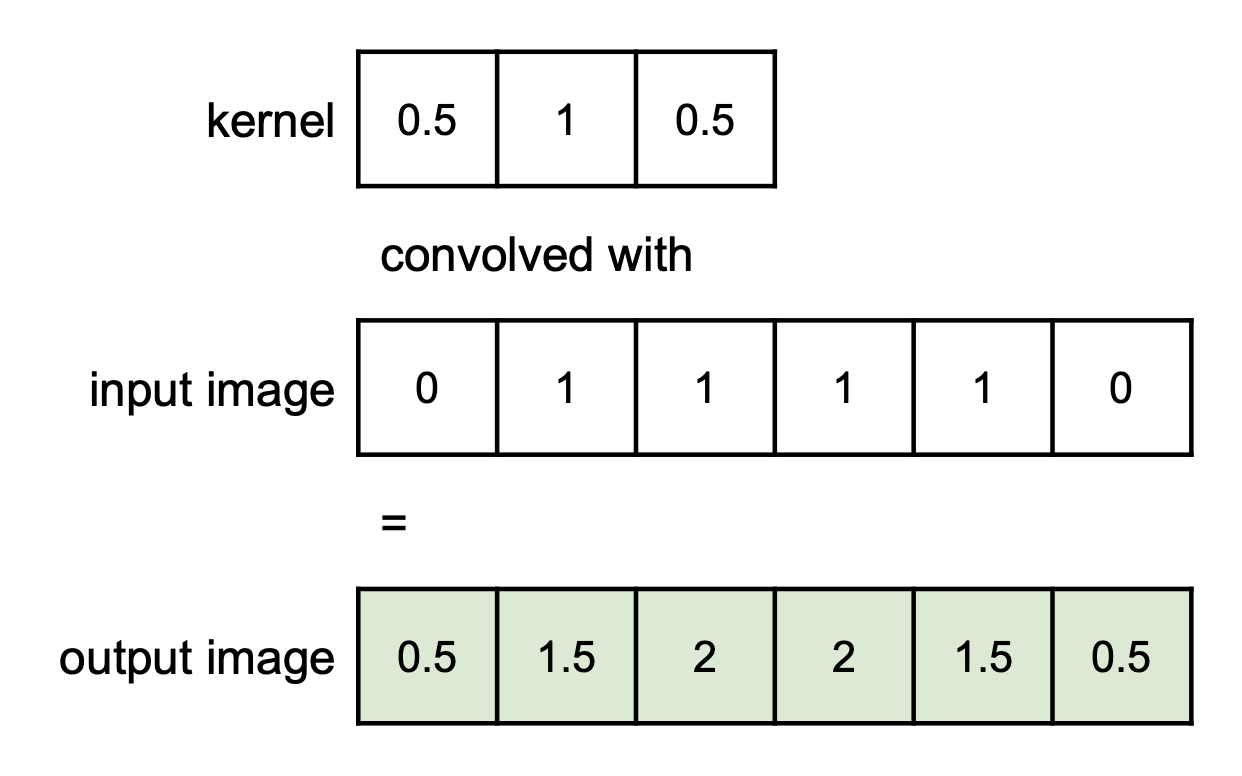
Answer:
Explanation:
The value of the output image at index
Applying this formula for each index results in the image above.
Convolution over a 2D Image
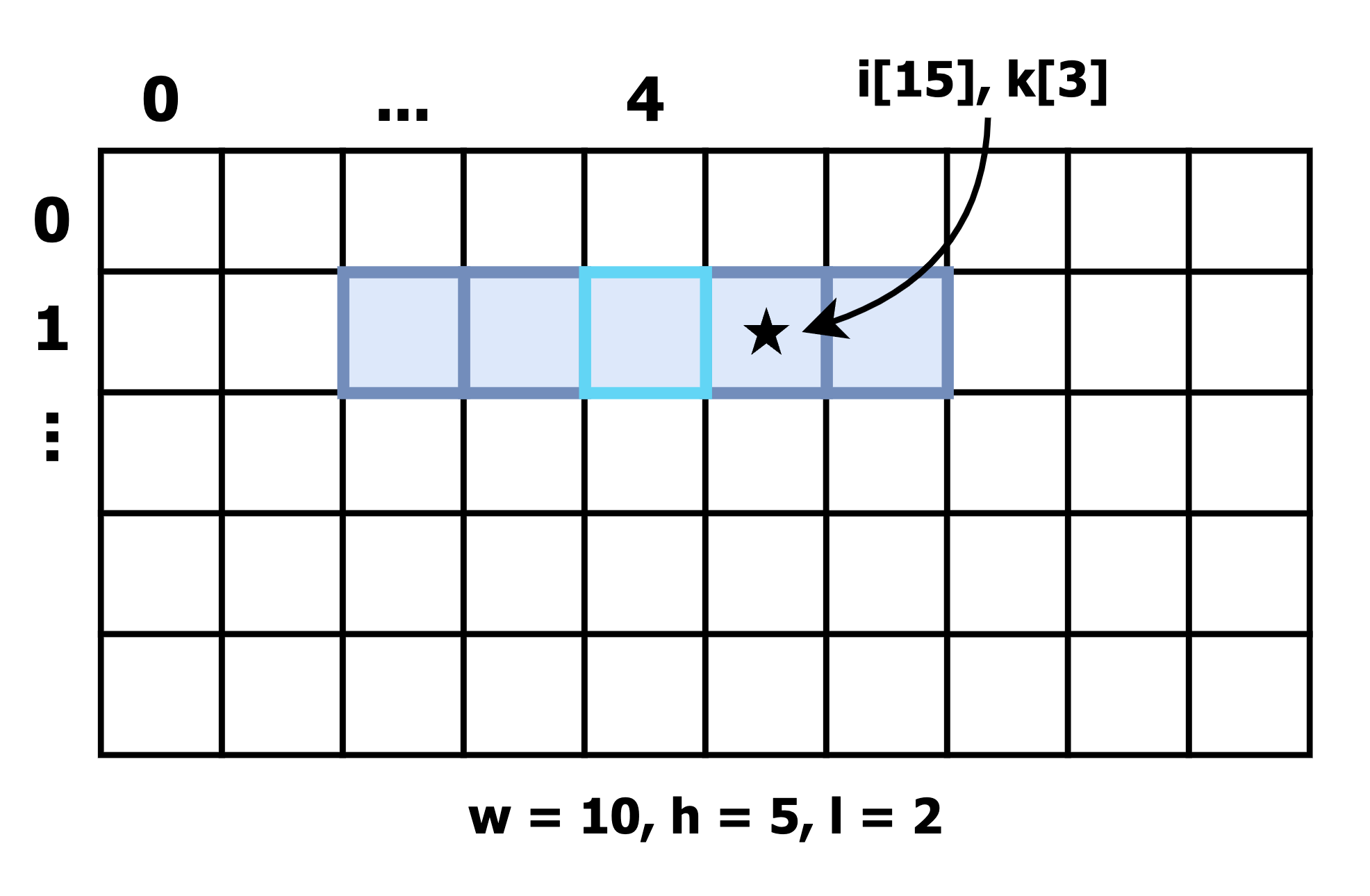
Suppose that you are given a 1D image vector
Write out pseudocode to slide the kernel
How would you need to adjust this pseudocode if the kernel were positioned vertically instead?
Answer:
For horizontal convolution, the pseudocode might look like this:
for each row in the image...
for each column in the image...
for each element in the kernel...
find the row and column of the current pixel:
row = current row
column = current column + element index - kernel radius
use row and column to find the index in the 1D image vector
...
Continuous Convolution
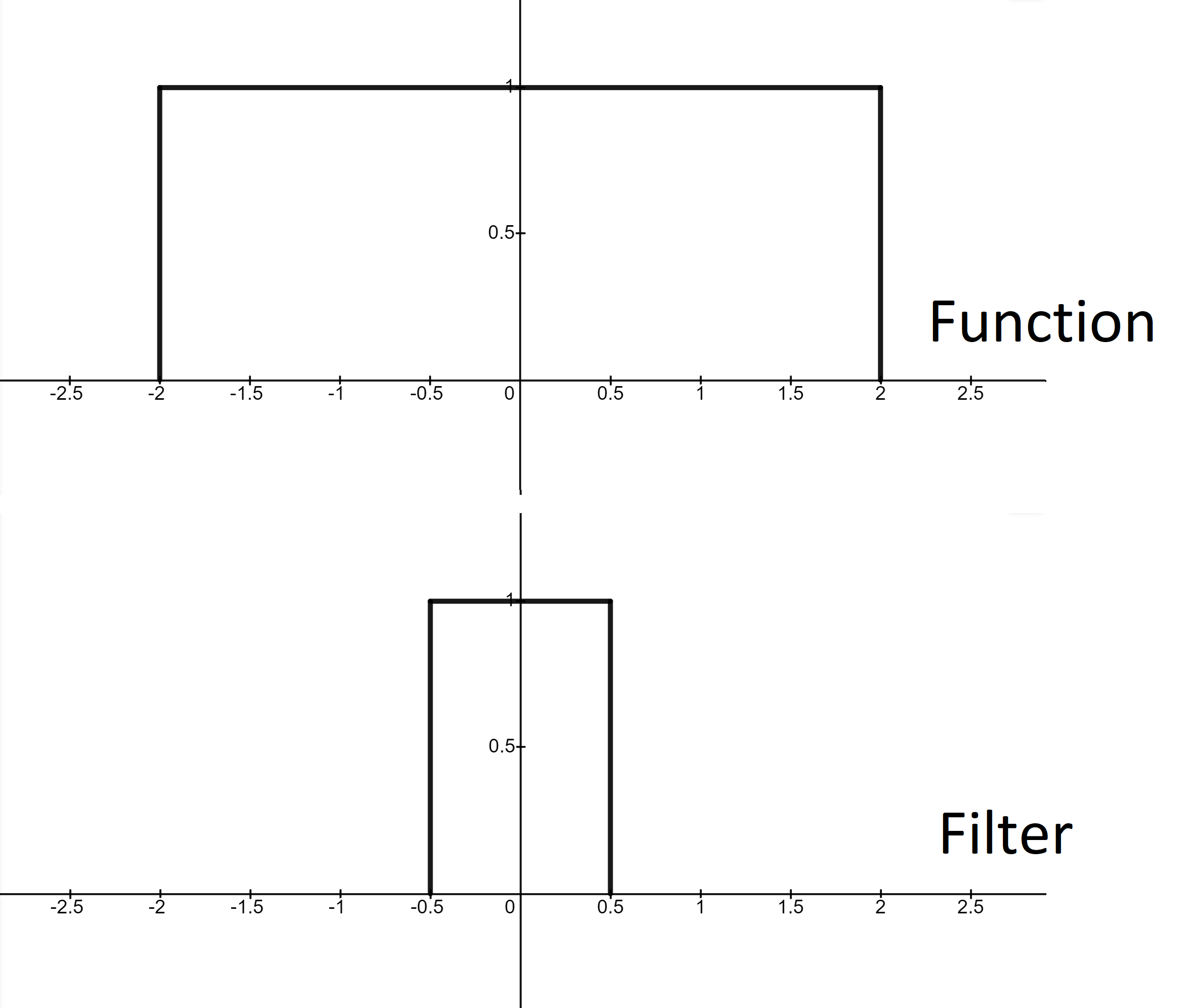
Convolve the below function and filter. What is the value of
Answer:
Visualizing Convolution
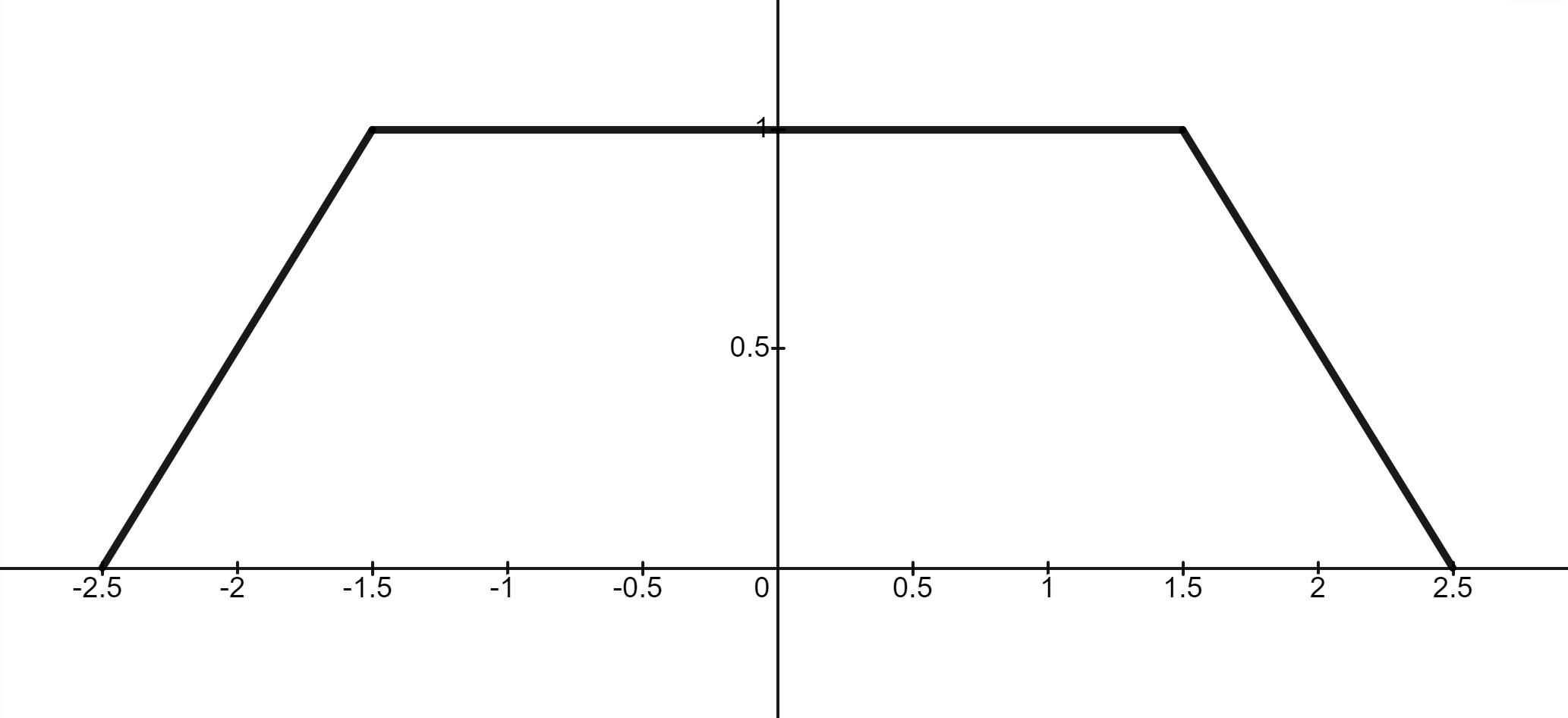
Work with your group on a whiteboard to draw the shape of the output function obtained in the previous question (figure 3).
Answer:
Explanation:
Imagine the filter, flipped (such that
While doing this, we can identify 4 important points we need to accurately graph the output function:
- The first point where the boxes start to overlap (
), - The first point where the boxes fully overlap (
), - The point where the boxes stop fully overlapping (
), and - The point where the boxes stop overlapping at all. (
),
As the maximum overlapping area of both inputs is
From
Blurring
Let's try to generalize our solution to the earlier discrete convolution problem.
Consider a 1D kernel
All of
, , and can be considered as 1D arrays storing intensities where gives the intensity of the -th pixel. Remember that the kernel is zero-indexed so gives the left-most value in the kernel array.
We are interested in writing out this convolution as summation over the values of
You may ignore edge effects for the purposes of this question (i.e. feel free to "incorrectly" index out-of-bounds).
Begin thinking through this question on your own, and then work with the group to come to an answer. Note that there may be multiple correct answers here!
Answer:
Both answers below are equivalent:
Explanation:
Remember that we must define a summation over the element-wise multiplication of function
We must also ensure that
With these two constraints in hand, we are ready to define a summation either from
Scaling
Scaling Up
What is the filter support width when you scale by a factor of
Answer
Explanation:
For this explanation, please assume a 1D image.
A triangle filter of width
* Technically...
There are cases where, for an output pixel, we sample only "one" pixel in the original image:
- An output pixel at the edge of the image samples only the input pixel at the exact same position, and its neighbor pixel (but with weight 0, since it's at the tip of the triangle);
- In fact, any output pixel which has the exact same position as an input pixel will sample only that input pixel, plus its neighbors (again, with weight 0).
- This makes sense, since we already know what color that pixel should be: the same color as the input pixel at the same position.
Scaling Down
What is the filter support width when you scale by a factor of
Answer
Explanation:
The reason we use a filter while scaling is to avoid aliasing. Ideally, we'd like to use an ideal low-pass filter: this would be a box in the frequency domain, and a sinc in the spatial domain. Of course, we cannot use a sinc, so we approximate this sinc with a triangle (for scaling, in CS 1230).
This approximation is what gives rise to the answer
Extra: but why is it
It's not necessary for you to understand the math behind this derivation, but given that we have an input image with some max frequency
This corresponds to a filter which looks like a box function with width
We approximate this sinc with a triangle with width
Naïve Back-mapping
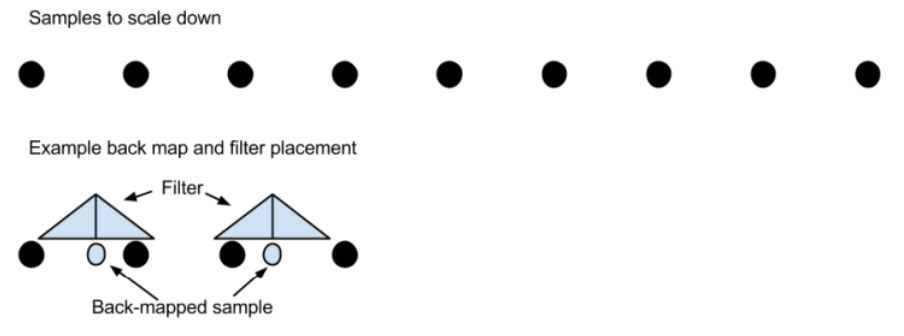
Recall from lecture that back-mapping refers to finding the correct filter placement given a pixel in the output image.
The naïve back-map function is
Suppose we wanted to scale down a 9-pixel 1D image by a factor of
With your group, draw out the 9 pixels of the original image, and show where we would sample the original image using the naïve back-map function. Include an illustration of the filter above each sample point.
Answer
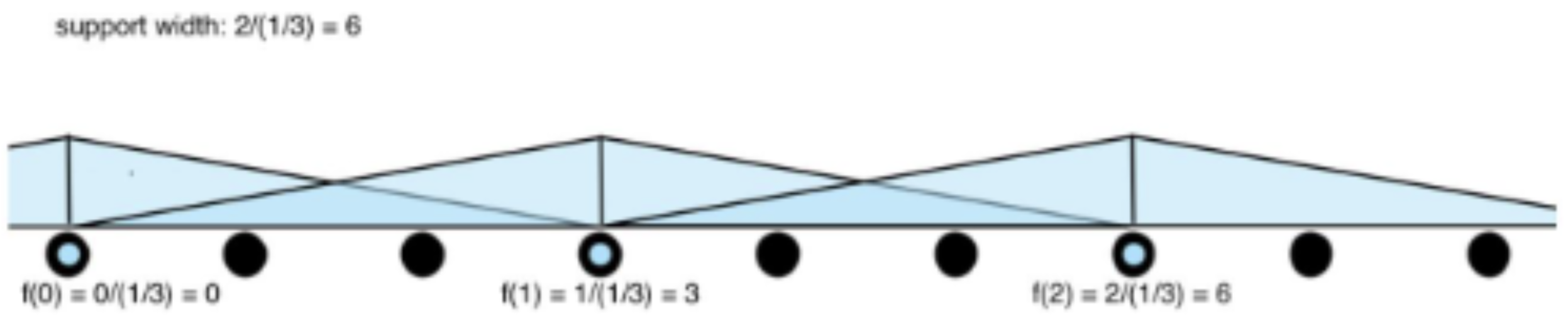
Explanation:
Since we are scaling the image by a factor of
Correct Back-map
Draw another picture to show where we would sample the original image using the correct back-map function. Again, please include an illustration of the filter above each sample point.
Discuss the differences between the two methods, and what might happen if we used the naïve back-map function in practice.
Answer
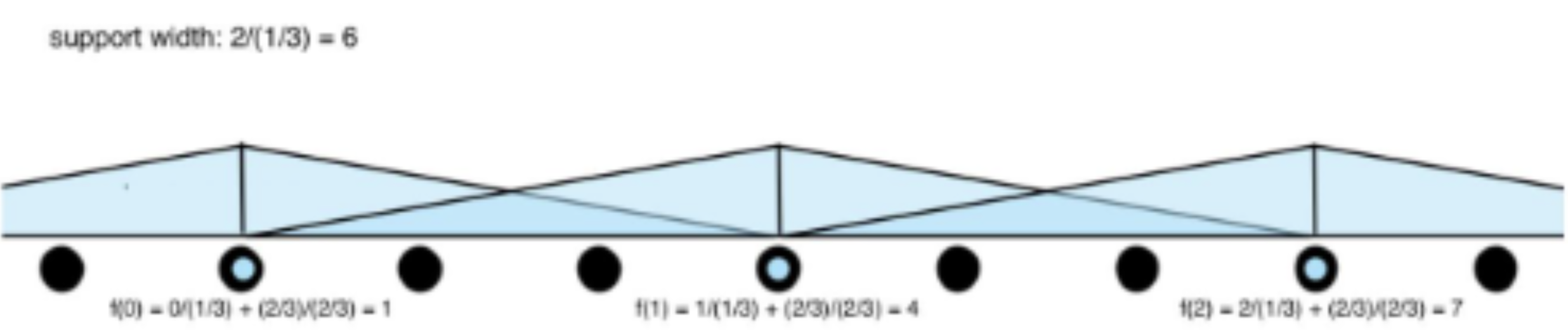
Explanation:
Again, the support width of our filter should be 6 because we are scaling the image by a factor of
Duality of Domains
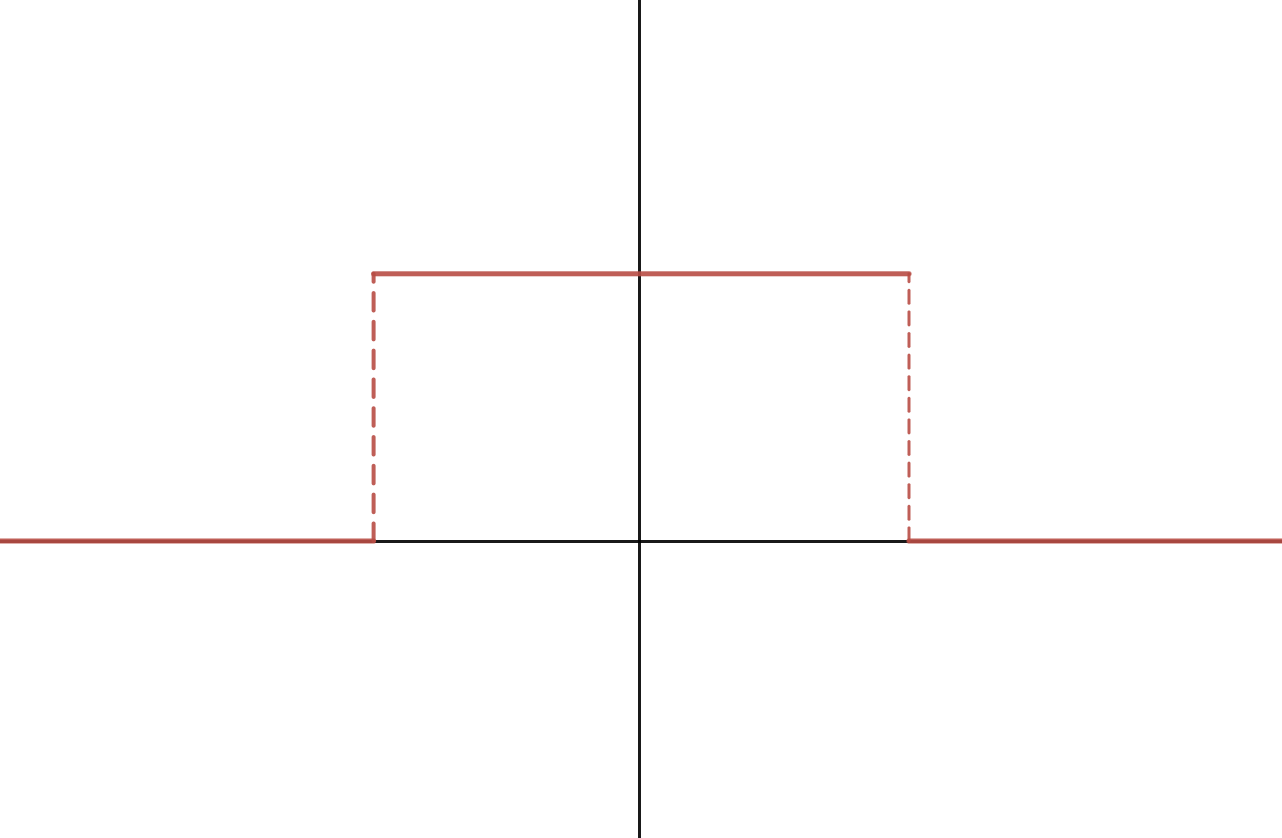
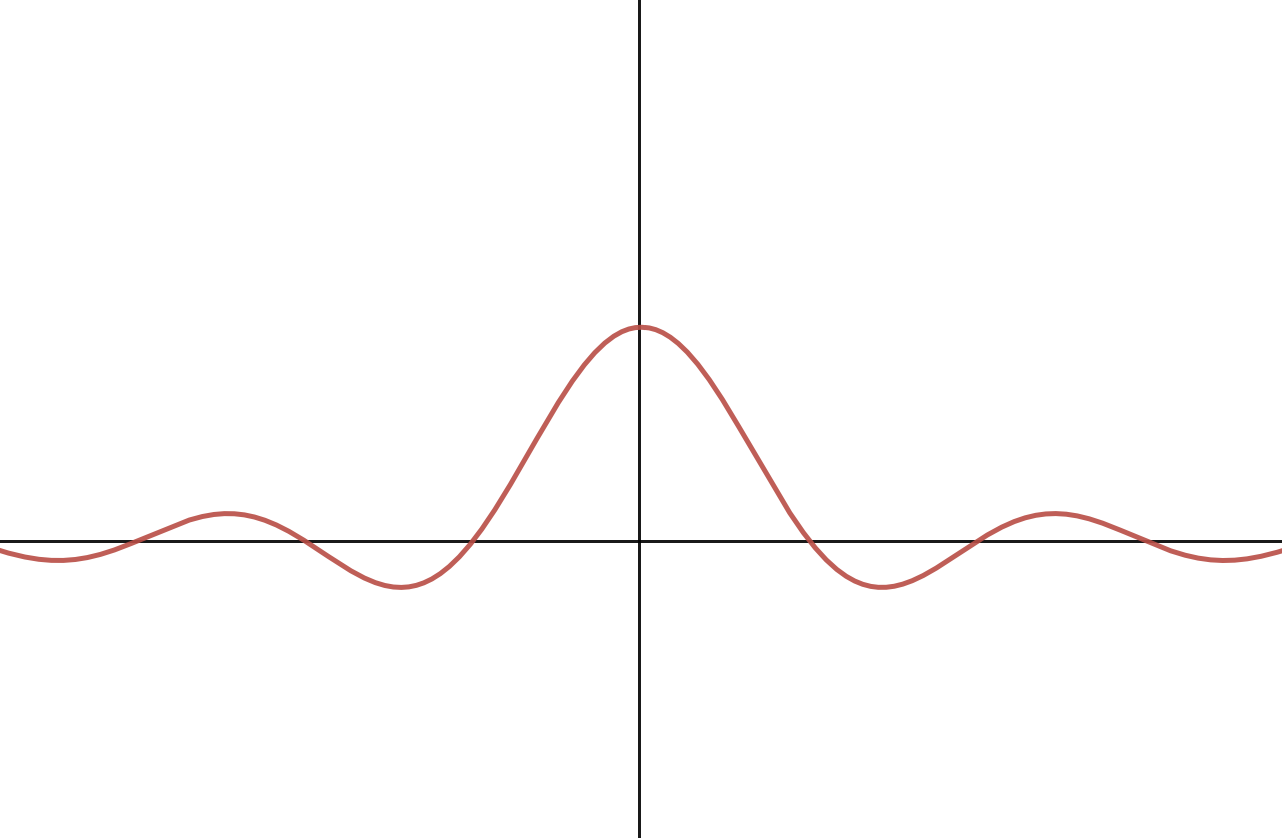
Visualizing Sinc and Box Duals
Take a look at the box function in figure 5 (left) below. Its dual in the frequency domain is the sinc function, in figure 5 (right). Note that there are no labels on the axes, by design.
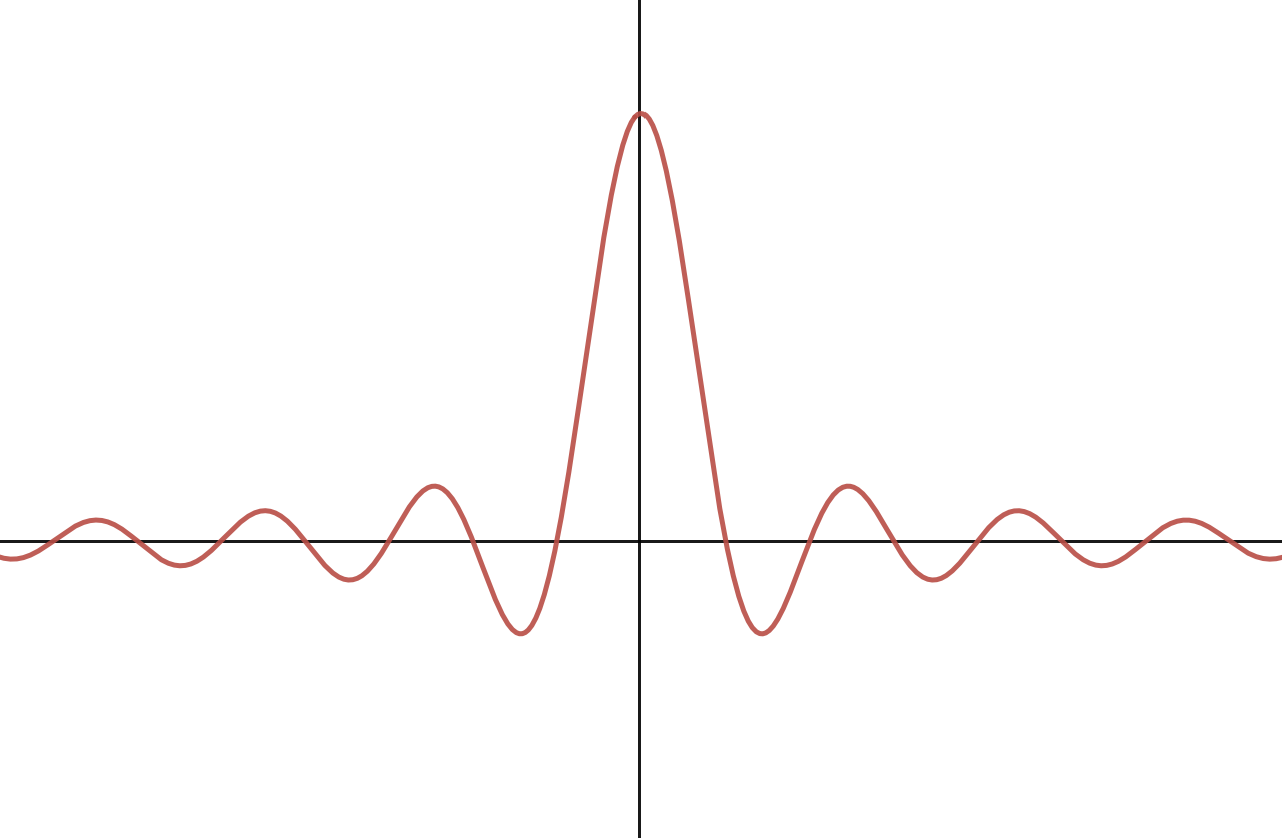
Draw out a sketch of the dual of the box function in figure 6. Your drawing doesn't need to be perfectly accurate; but enough to show that you understand the concept.
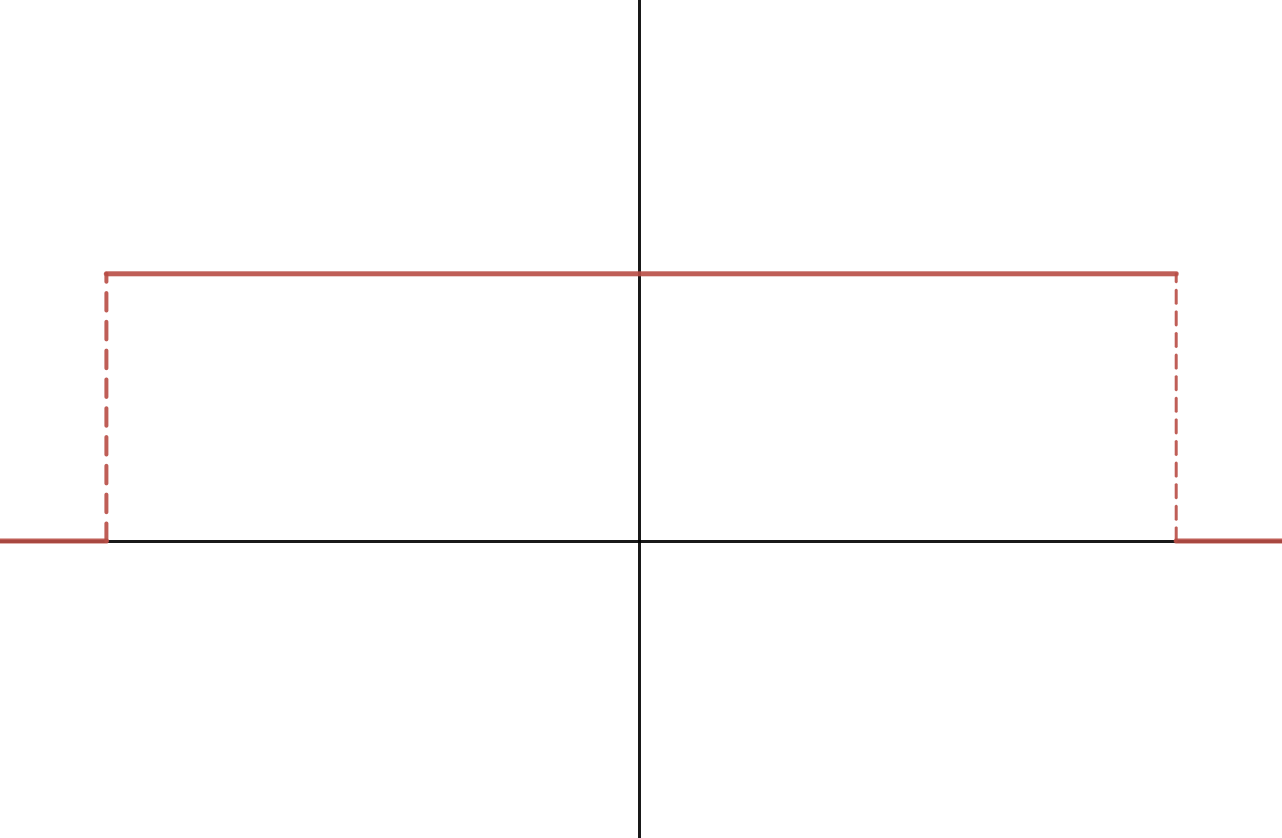
When you are finished, explain your group's thought process to the TA.
Answer
Explanation:
A wider box function in the frequency domain means that there are more signals with higher frequency. To reflect this fact in the spatial domain, the sinc function needs to have higher frequency, or, oscillate more. Visually, the sinc function becomes narrower.
Approximating Sinc
What do we usually use to approximate the sinc function, and why do we have to make this approximation when translating these theoretical concepts into code?
Discuss with your group and then call over the TA to check your understanding.
Answer
A Gaussian function. Though, in cases where the approximation doesn't have to be as good, a triangle function can be used instead.
Explanation:
Both the Gaussian and triangle filters are cheaper to use.
Sinc functions are infinite in extent, and it's simply not feasible to perform discrete convolution with an infinitely large, nor would it be performant to approximate it with a "very large" one.
Gaussians are technically also infinite in extent, but fall to almost-zero fairly quickly. Thus, Gaussians can be used as a cheaper approximations to the sinc filter. Compared to the triangle, it also has a nice property: a Gaussian's dual in the frequency domain is another Gaussian, which means it better approximates a good low-pass filter.
Sampling in the Frequency Domain
If we're sampling a continuous function at a frequency of
Answer
Any frequency less than, but not equal to
Explanation:
In order to capture all frequencies in a signal, we must sample at a rate that is strictly higher than 2 times the highest frequency. Thus, if are sampling
Frequency Plots
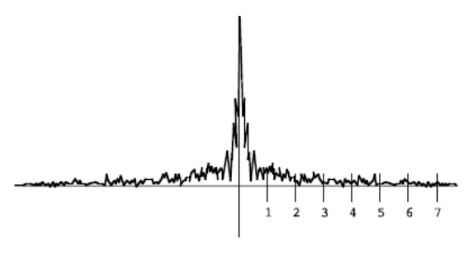
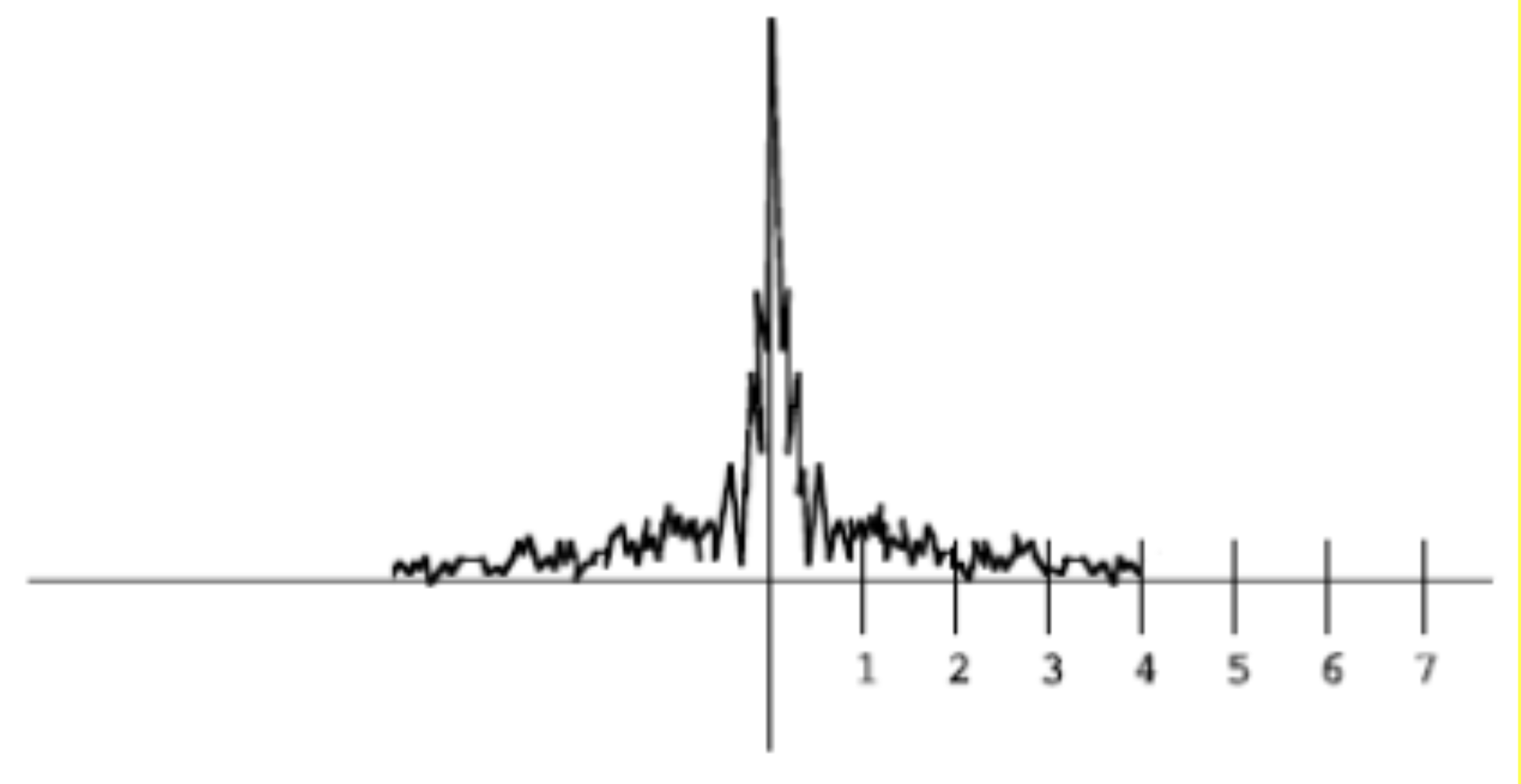
Now, examine the following frequency plot of a 1D, continuous signal. If you were going to sample this signal at a rate of 8 samples per unit, to avoid aliasing, you would use what we know about the Nyquist limit to pre-filter it.
Draw out the new frequency plot after someone has performed this pre-filtering step optimally. Make sure to include any relevant amplitude and/or frequency values.
Answer
Explanation:
To avoid aliasing, we need to prefilter the signal by running a low-pass (blur) filter to eliminate high frequencies. In the frequency domain, if we want to eliminte frequencies higher than
In our case, since we are sampling the signal at 8 samples per unit, we can only represent functions with frequency lower than 4. Thus, the box function centered around 0 should have width
Submission
Algo Sections are graded on attendance and participation, so make sure the TAs know you're there!